| 持続可能な社会形成を支える ナノテク・材料研究 I |
| 形状記憶合金を用いたMEMS用 大変位強力アクチュエータの開発 |
 |
 |
 |
材料研究所
機能融合材料グループ |
京都大学大学院 工学研究科 |
|
石田 章 |
佐藤 守夫 |
田畑 修 |
|
|
||||||||||||
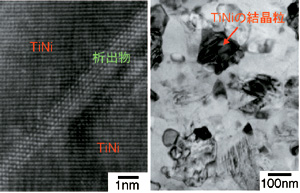
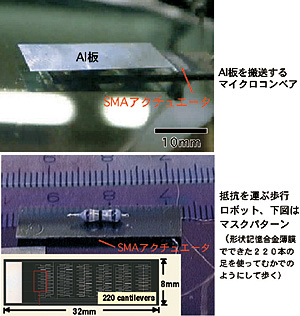
| 機器の小型化や携帯化により利便性の増大と高機能化が進んでいる近年の技術分野において、微小な部品を動かすためのアクチュエータの開発は、新たな製品を生み出すためのキーテクノロジーとして重要性を増しています。特に、最先端の微小機械では、コンピュータの集積回路と同じ方法で部品を作りながら組み立てていくMEMS(Micro Electro Mechanical Systems)技術が採用され始めており、半導体プロセスによって作ることができる新しいタイプのアクチュエータが求められています。 私達が開発を行っている形状記憶合金薄膜アクチュエータは、従来の圧電素子に比べて発生力で15倍以上、変位量で50倍以上の性能を示し、これまで提案されているどのマイクロアクチュエータよりも大きな力を発生させることができます。形状記憶合金薄膜は半導体の成膜プロセスで作られるので、既に実用化されている鋳造して作った形状記憶合金とは組成も組織も異なります。 図1の左の図は、Ti過剰側のTi-Ni形状記憶合金薄膜の組織ですが、形状記憶効果を担うTiNi合金の中に鋳造材では形成されない1nmの厚さの微細な析出物が形成されることがわかりました。図1の右の図はTi-Ni-Zr合金の例ですが、鋳造材では結晶粒の大きさが50μm程度もあり、脆くて使えませんが、薄膜では大きさが200nm程度にまで小さくなっています。このようなnmオーダーの微細組織を制御することによって、鋳造材では得られなかった優れた機械的特性と形状記憶効果を実現することができました。表紙写真上と図2は、私達が開発した形状記憶合金薄膜を使ってSi基板上に作製した微小機械です。歩行ロボットの足は、これまでSiで作られていたために壊れやすいという問題に直面していました。ここで示した歩行ロボットは、機械的特性(合金によっては50%以上変形させても破断しません。)に優れた形状記憶合金薄膜を足に使っているので壊れることはありません。現在、産業界との連携の下で形状記憶合金薄膜アクチュエータの実用化を目指して研究開発を行っています。 |
|
 |
||
|